Using drivers
First, we need an object of a type which can be imported into Godot with the glTF importer.
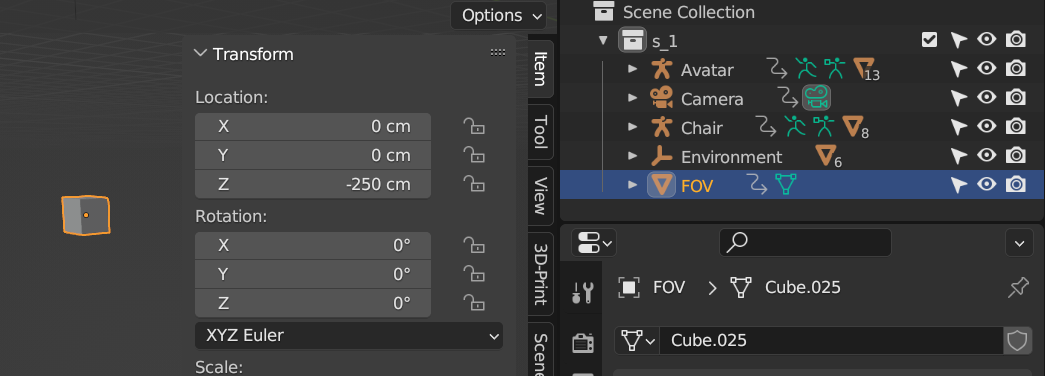
Create an object, such as a default Cube, so we can see it in the viewport when it is driven.
However, this may also be an invisble object, like an empty. Lets position it somewhere on
the Z axis where it is somewhere which can't be seen during the cinematic sequence.
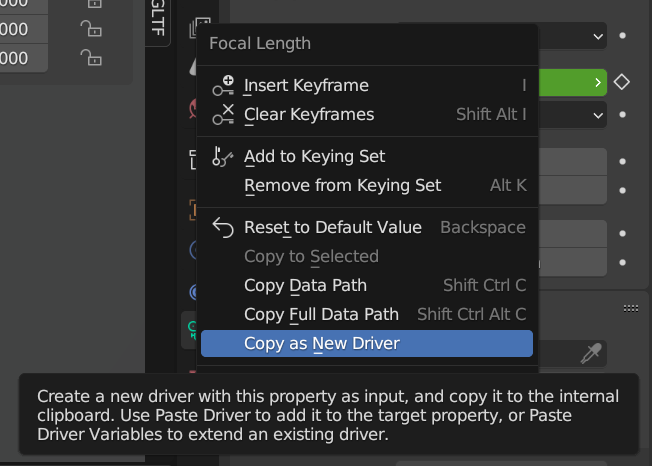
Next, we need to copy a new driver from the scene camera's focal length parameter.
Simply select the scene camera, go to the camera's Data tab where you find the Focal Length,
and right click the parameter and select Copy as New Driver.
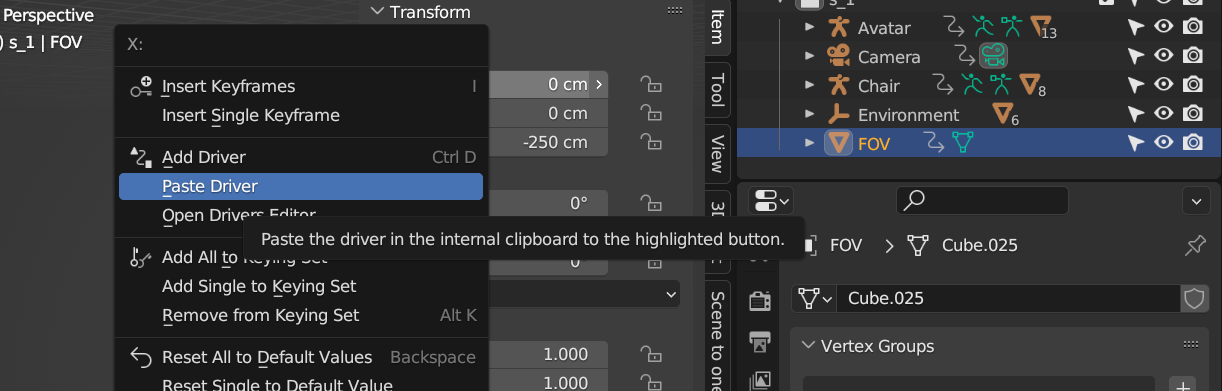
Now paste the driver onto a transform channel of the object that is to be driven, which in
this case if the Cube that was made. This will result in the position of the cube to be the
same value as the camera's focal length. In this case, 35mm focal length becomes 3500 in the
X-axis.
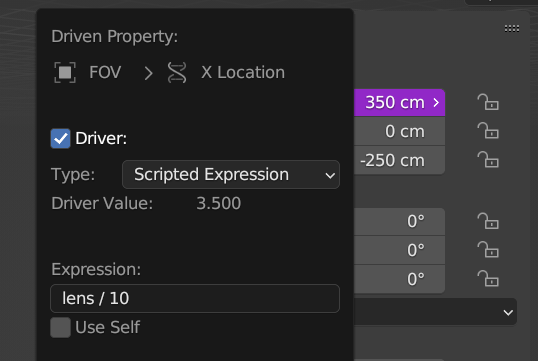
If you don't like the extreme values, for instance due to fear of floating point errors, then
you can make a custom expression by right clicking the transform channel where you pasted
the driver and selecting Edit Driver. Here, you may change the type to Scripted Expression
and write your own mathematical expression, for instance by dividing it by 10.
If you do so, then that must be accounted for in the Godot script below to get the right FOV
during the sequence in Godot.
Now, we just need to export it.

 mail me
mail me

